
自动驾驶是目前汽车行业最热门的话题之一,现有汽车制造商和新进入汽车市场的企业都在开发具有自动驾驶功能的汽车。这些自主能力的开发人员正受益于摩尔定律,摩尔定律使得处理能力和传感器技术显著提高,同时也降低了成本。威拉德涂
自动驾驶是一个复杂的领域,涵盖了从完全自动驾驶到与驾驶员共享控制等一系列功能。为了对不同的自动驾驶能力进行分类,美国汽车工程师协会(Society of Automotive Engineers)将自动驾驶定义为以下几个级别:
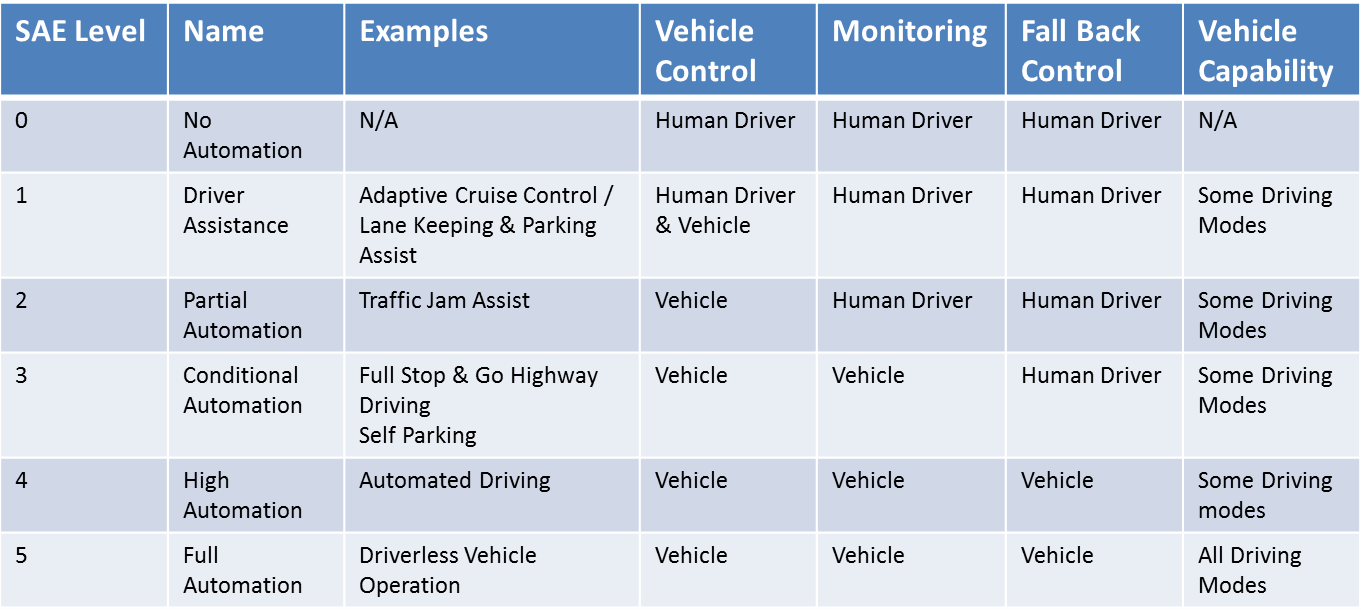
 SAE自动驾驶级别定义。
SAE自动驾驶级别定义。随着自动驾驶水平的提高,车辆对环境的理解和在同样的环境中安全行动的需求也在增加。为了使车辆能够理解并安全地与环境进行交互,需要从超声波、GPS、雷达、摄像机到激光雷达等多种传感器形式,以及相关的处理能力。
每种不同的模式都能提供车辆整体环境的数据;形成一个完整的画面需要自动驾驶汽车将这些元素融合在一起。不同的传感器部署和模式将根据所实施的自治水平而有所不同。然而,相机将用于辅助车道保持、盲点检测和交通标志识别等应用,而雷达实现的频率调制连续波(FMCW)可能用于确定与目标的距离。对于第二级及以上级别,全面了解车辆环境的能力至关重要。这使得车辆能够识别其位置和周围的障碍,从而实现安全导航。通过相机、雷达和激光雷达以及全球定位系统(GPS)的数据,可以了解它的环境。GPS数据本身不能依赖,因为它的精度变化,同时也很容易被建筑物和基础设施屏蔽。
了解他们的环境并采取行动是自主能力的关键促成因素。由于在所有六个层面的意外行动或行动,生命和环境都处于危险之中。因此,自主能力必须在一个框架内发展,以确保设计及其所有元素的安全性。根据ISO26262标准开发自动驾驶汽车是绝对必要的。该标准提供了一个框架,如果遵循该框架,就可以确保安全,定义了几个汽车安全完整性级别(ASIL)及其允许的故障率。自动驾驶解决方案一旦在全球市场部署,也将受到一系列恶劣环境的影响。为了确保系统能在这些环境中运行,汽车级部件需要获得AEC-Q100以上的广泛认证。
设计类: