NVIDIA和开放机器人签署了一项协议,以加快Jetson Edge AI平台和基于GPU的系统的最新开源机器人操作系统(ROS 2)的性能。
NVIDIA将提供一套工具,可以减少开发时间,并提高寻求将计算机视觉和AI /机器学习功能纳入基于ROS的应用程序的开发人员的性能。
“随着更多ROS开发人员利用包含额外计算能力的ROS开发人员设计用于卸载主机CPU的额外计算能力,ROS正在不断发展,以便更轻松地利用这些先进的硬件资源,”开放机器人首席执行官Brian Gerkey说。“与NVIDIA这样加速的计算领导者以及其在AI和机器人创新的巨大经验之类的工作将为整个ROS社区带来显着的利益。”
开放式机器人将增强ROS 2,以便在NVIDIA Jetson Edge AI平台上的GPU和其他处理器跨GPU和其他处理器实现数据流和共享内存的高效管理。这将显着提高应用程序的应用程序的性能,这些应用程序必须实时地处理来自传感器和激光器等传感器的高带宽数据。
此外,开放式机器人和NVIDIA正在努力开放机器人点火凉伏与OMNiverse上的NVIDIA ISAAC SIM之间的仿真互操作性。ISAAC SIM已支持框中的ROS 1和2,并具有与流行应用的连接的全部重要生态系统,例如搅拌机和虚幻引擎4。
点火凉亭为整个机器人社区带来了几十年的广泛使用,包括在较高的竞争活动,如正在进行的DARPA地下挑战。
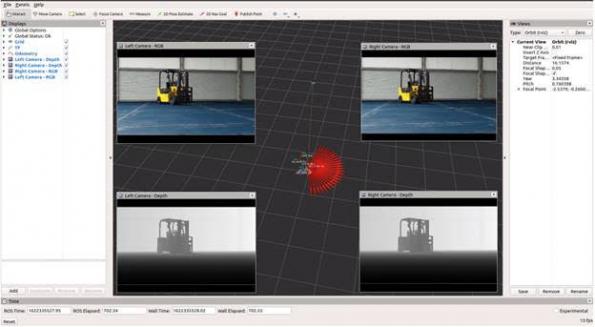
With the two simulators connected, ROS developers can easily move their robots and environments between Ignition Gazebo and Isaac Sim to run large-scale simulation and take advantage of each simulator’s advanced features such as high-fidelity dynamics, accurate sensor models and photorealistic rendering to generate synthetic data for training and testing of AI models.
该协作产生的软件预计将在2022年的春天释放。
ROS的ISAAC宝石是硬件加速软件包,使ROS开发人员更容易在Jetson平台上建立高性能解决方案。这些宝石的重点是提高图像处理的吞吐量以及对基于DNN的感知模型,这对机器人来说越来越重要。这些包在提供显着性能增益的同时减少主机CPU上的负载。
除了成为机器人模拟器之外,ISAAC SIM可以生成培训和测试感知模型的合成数据。这些功能将更加重要,因为机器人将更多的AI感知功能纳入其平台。很明显,机器人可以感知其环境更好,这可以更加自主,从而需要较少的人类干预。
一旦ISAAC SIM生成了合成数据集,它们就可以直接进入TAO,来自NVIDIA的AI模型适应平台,以适应机器人的特定工作环境的感知模型。在从目标周围收集的任何真实数据收集之前,可以在给定的工作环境中开始在给定的工作环境中执行机器人的感知堆栈的任务。
相关ros2文章
关于Eenews欧洲的其他文章